Articolazione del ginocchio, un esoscheletro per stimolare l'andatura
La locomozione umana è caratterizzata da interazioni dinamiche tra una persona e l'ambiente. L'andatura umana bipede si caratterizza per l'efficienza metabolica, versatilità e robustezza alle variazioni del terreno.
Disturbi agli arti inferiori possono avere un effetto drammatico sulla mobilità e sulla qualità della vita delle persone affette.
Nonostante tutti i progressi compiuti nello sviluppo di trattamenti e tecnologie per l'assistenza dell'andatura, si può arrivare a migliori strategie di riabilitazione.
In primo luogo, è utile comprendere il trattamento e la prevenzione dei disturbi del movimento; in secondo luogo, è utile caratterizzare le proprietà dinamiche degli arti e delle articolazioni per lo sviluppo di dispositivi di assistenza, come ortesi e protesi adatte.Articolazione del ginocchio, un esoscheletro per stimolare l'andatura
Il ginocchio

L'articolazione
del ginocchio umano mostra una varietà di comportamenti meccanici, che
garantiscono durante l'andatura efficienza e robustezza in condizioni
variabili. Al giorno d'oggi è in aumento l'utilizzo di protesi e dispositivi di
assistenza.Questo rende neccessario il controllo neurale delle ariticolazioni
intatte per quantificarne le proprietà.Questa quantificazione è ottenuta
attraverso metodi sperimentali basati sulla stimolazione, che richiedono lo
sviluppo di strumenti specializzati, che devono essere in grado di fornire
stimoli di input e misurare con precisione, un lavoro molto impegnativo.
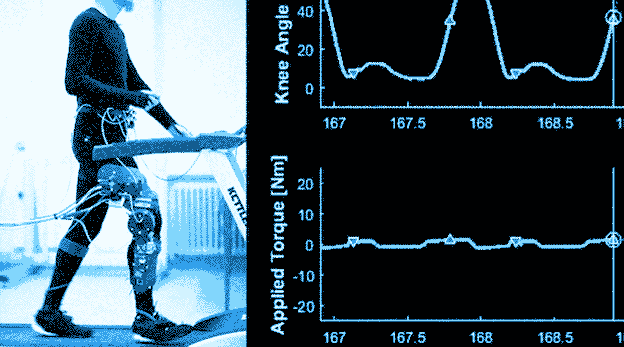
L'esoscheletro

Presentiamo
lo sviluppo di ETH Knee Perturbator: uno strumento per stimolare il ginocchio
durante l'andatura. Si tratta di un esoscheletro indossabile sviluppato per
applicare perturbazioni di posizione all'articolazione mentre si misura la
coppia di interazione.Si è dimostrato che identifica carichi passivi noti con
un'accuratezza del 15%. Inoltre che il dispositivo è ben tollerato dai soggetti
durante un esperimento con perturbazioni impreviste. L'ETH Knee Perturbator
saràdunque uno strumento utile per quantificare la risposta neuromeccanica del
ginocchio umano durante l'andatura.
BIBLIOGRAFIA
Michael R. Tucker , Camila Shirota , Olivier Lambercy , James S. Sulzer , Roger Gassert "Design and Characterization of an Exoskeleton for Perturbing the Knee During Gait"
1.J. Rose, Human Walking, Philadelphia, PA, USA:Williams & Wilkins, 2006.
2. R. L. Waters, S. Mulroy, "The energy expenditure of normal and pathologic gait", Gait Posture, vol. 9, no. 3, pp. 207-231, 1999.
3. M. Tucker et al., "Control strategies for active lower extremity prosthetics and orthotics: A review", J. NeuroEng. Rehabil., vol. 12, no. 1, pp. 1-30, 2015.
4. E. Perreault et al., "Considering limb impedance in the design and control of prosthetic devices" in Neuro-Robotics: From Brain Machine Interfaces to Rehabilitation Robotics, New York, NY, USA:Springer, pp. 59-83, 2014.